
Networked Snowflake-N - Aerodynamic Decelerator Systems Laboratory
Networked Snowflake-N
To mitigate the effect of unknown and constantly changing surface-layer winds, the terminal guidance algorithm employs continuous (real-time) re-optimization of the base-turn maneuver. But this is not the only novel idea the Snowflake ADS utilizes to achieve unprecedented touchdown accuracy. The networked version of Snowflake, Snowflake-N, developed collaboratively with another research and development center at NPS, Center for Network Innovation and Experimentation (CENETIX), enables communication between multiple descending ADS, ground weather stations and operator/user, who can reside anywhere in the world (global reach).
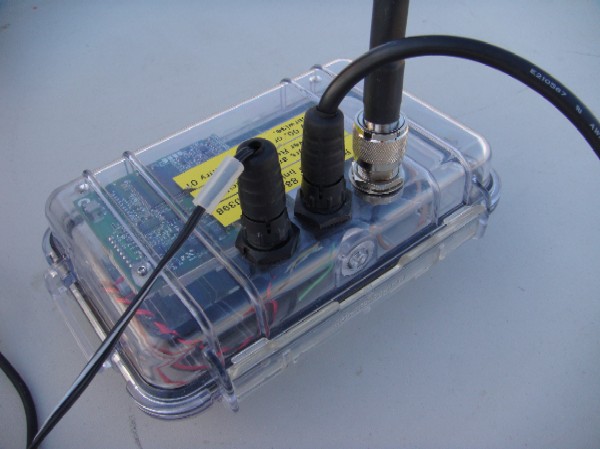
One possible robust network architecture for command and communication is presented in Fig.O. Its key component, a portable ground target weather station (Fig.Pa), was developed and employed to measure the ground winds (magnitude and direction) and then broadcast them to the descending Snowflakes along with the current altitude settings.
The target weather station (TWS) was based on a portable Kestrel-4000 weather device (weighting only 3.6oz), which was slightly reprogrammed to be able to constantly output all necessary information. In terms of accuracy, Kestrel-4000 is capable of measuring wind’s direction within 5º, speed – within 0.1kts and atmospheric pressure – within 0.1psi (or 1ft). The TWS communicated with a descending Snowflake-N via the miniature computer and 900MHz FreeWave radio module residing in a Pelican-1150 case nearby (Fig.Pb). This short-range communication between Kestrel and TWS computer utilized the advantages of a Bluetooth interface.
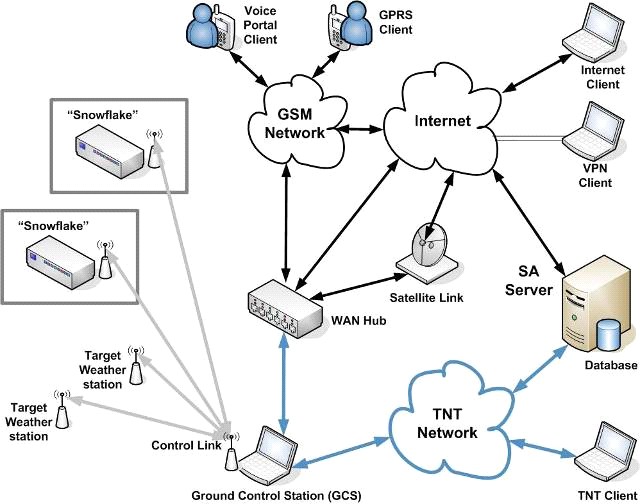 |
| Figure O. Network architecture for the Snowflake-N ADS. |
 |
| Figure P. Portable weather station on a vane and its communication computer (at the bottom right corner). |
In turn, a TWS FreeWave radio passed information from TWS on to the ground control station (GCS). The GCS gathers information from multiple target weather stations and broadcasts it to multiple descending Snowflake-N. Depending on what specific IPI was assigned to each particular Snowflake-N, the latter only accepts weather data from IPI-specific TWS. If IPI during the ADS descent was reassigned, Snowflake-N starts listening to TWS pertaining to that newly-assigned IPI. Once Snowflake-N receives a new piece of data, it responds back to GCS (via 900MHz FreeWave radio available on board) with its current parameters. Therefore, the GCS has a full situational awareness of all TWS and Snowflakes ADS all the time. If GCS is connected to the Internet (via Ethernet, wireless or satellite link), this information becomes available globally. Figure Q features the GCS' 900MHz FreeWave radio set (Fig. Qa) and a small, lightweight, satellite terminal (Fig. Qb) allowing accessing Inmarsat’s Broadband Global Area Network service (BGAN) available worldwide. Once the first Snowflake-N reaches the ground it broadcasts an estimated wind profile to the remaining still-descending ADS to improve their touchdown accuracy even further.
   |
| Figure Q. The GCS' 900MHz radio set and Hughes BGAN terminal (far right). |
The Snowflake-N payload can also include a standard cell phone, which communicates with the autopilot via a Bluetooth/serial module. This allows sending and receiving packages of data via the AT&T GSM network to the Internet directly. In this case, the TWS can also include a cell phone / Bluetooth module bundle allowing them to be clients of the network as well, and therefore talk to Snowflake ADS directly. The communication architecture for this case is shown in Fig.R, while Fig.S features a Kestrel/Blackberry/Bluetooth module bundle.
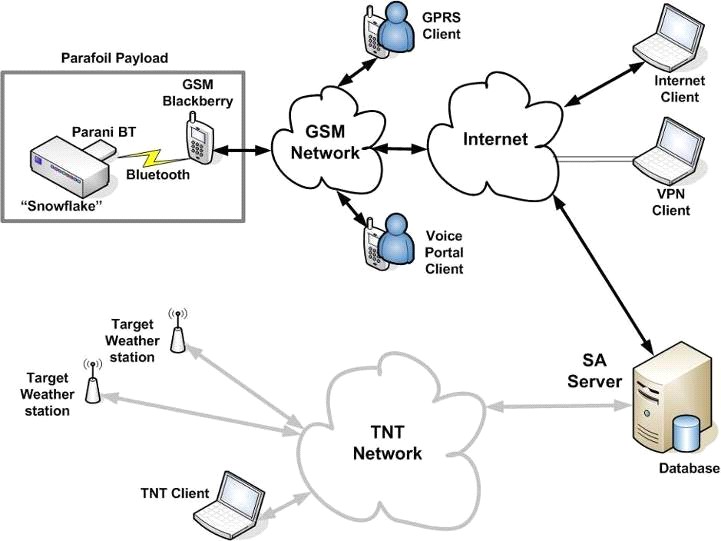 |
| Figure R. The Snowflake-N communication architecture relying on the GSM network. |
 |
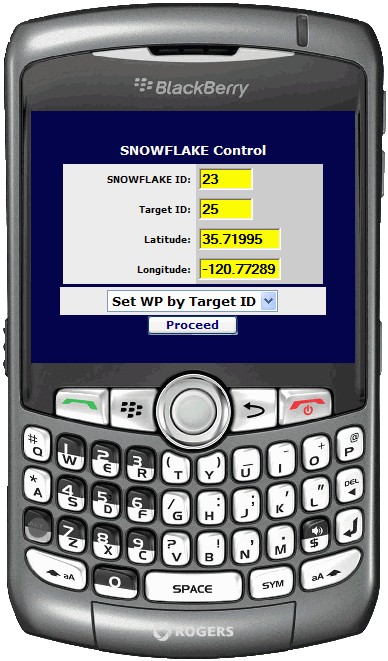 |
| Figure S. The target weather station posting its data via Blackberry cell phone (on the back). | Figure T. Blackberry cell phone with the Snowflake control interface. |
As shown in both Fig.O and Fig.R, the operator/user can monitor the mission (using a common Google Earth tool) and/or exert control at any moment via computer (Internet), GSM handheld, or voice portal to change any mission parameters (Fig.T shows the developed GSM handheld interface).
Originally developed for a single purpose of communicating with TWS to improve touchdown accuracy of the Snowflake ADS, the developed architecture enabled other novel capabilities. For example, in addition to Snowflake-N unique capability of delivering the supplies with high touchdown accuracy in hostile and hazardous environments, the system could also be used as an innovative individual temporary “node” of ad hoc self-forming tactical network or a hub for a short-term aerial-ground network. A slowly descending aerial node allows receiving data from the unattended sensors once it gets in the range of wireless link, and sending information out through a manned-unmanned network-on-the-move. Such a node becomes a perfect platform for bringing in nuclear radiation or chemical sensors close to the source, which otherwise is inaccessible. While collecting and feeding data out, remotely-controlled (in terms of IPI assignment) Snowflake-N could also bring a new set of disposable unattended sensors for the next step of data collection.
Several Snowflake ADS gradually descending in geographically distributed areas would enable largely distributed in time and space networking capability with sensors and small unit operators. Placing a small base station in Snowflake ADS payload would allow having highly undetectable wireless cell physically existing within 2-4 seconds of burst transmission. Then another cell or cluster pops-up 10-15 miles away from the source to receive some information temporary stored in UAV, air balloon, or ground vehicles relaying tactical information across a network-controlled battlefield. Several parafoils during the descent could comprise a short-term mesh for reaching further into the area without network coverage.