
Pegasus - Aerodynamic Decelerator Systems Laboratory
Pegasus Home
This research addressed the development of the guidance, navigation and control (GN&C) algorithms for an autonomous high-glide-ratio parafoil-based delivery system of the ultra-light weight class (Fig.A). This effort continued research and development undertaken during the design of Affordable Guided Airdrop System (AGAS). The goal was to develop a GN&C architecture allowing parafoil to track certain predetermined trajectories. That had to be done based on approximately the same onboard sensor suit as that of AGAS. Within the frame of this research
- a 6DoF model of 500-lb parafoil (developed by FXC Corp., Santa Ana, CA) was developed and rigorously tested
- a software tool allowing rapid prototyping of optimal descent trajectories was created
- a control system allowing tracking inertial reference trajectories in presence of uncertainties and disturbances was designed and tested in simulations
  |
| Figure A. Two configurations of Pegasus (two and four-point attachments). |
Figure B presents some of the model identification results when different criteria were used to match the model with the real drop data. Figure C shows a variety of inertial trajectories that can be generated for the following tracking. Finally, Fig. D demonstrates a result of one of the Monte-Carlo runs assuring robustness of developed tracking algorithm.
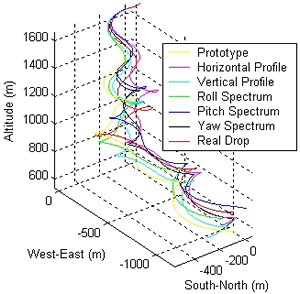
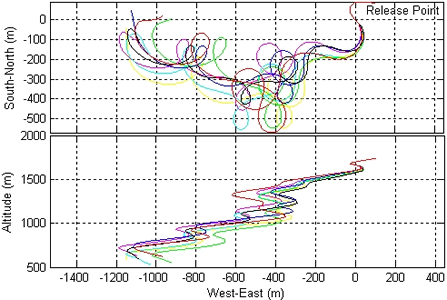
Figure B. The family of parafoil trajectories optimized with respect to different matching criteria.
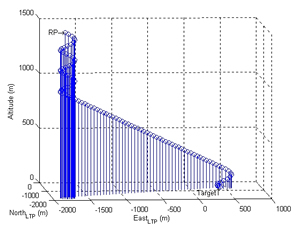
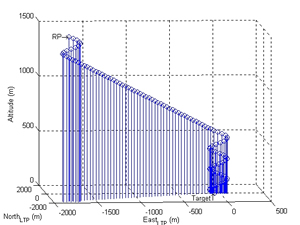
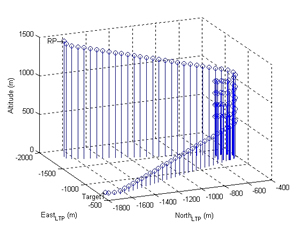
Figure C. Examples of inertial reference descent trajectories.
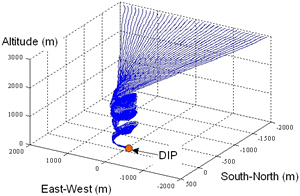
Figure D. Monte-Carlo simulation results.