
Teaching & Research Facilities - Autonomous Systems Track
NPS has a wide range of excellent, state-of-the-art research facilities that support underwater, surface, ground, aerial, space systems propulsion; guidance, navigation and control; combat systems design; electronic warfare; electro-optics; MEMS sensors; and many other areas.
In addition to that, a well-established field experimentation program provides a unique opportunity to test a developed autonomous system or its sensor in a restricted airspace, 100 miles South from NPS or in Monterey Bay.
These facilities are available for thesis research and joint projects between NPS, other service or agency laboratories, and industry through cooperative research and development agreements (CRADAs).
The major teaching facility supporting Autonomous Systems Track is:

This joint GSEAS laboratory supports all 2xxx and 3xxx level control courses offered by MAE/ECE/SE departments and also provides a set of experiments serving as an introduction to robotics.
The main research facilities for the Autonomous Systems Track are listed below:
 Center for Autonomous Vehicle Research
Center for Autonomous Vehicle Research
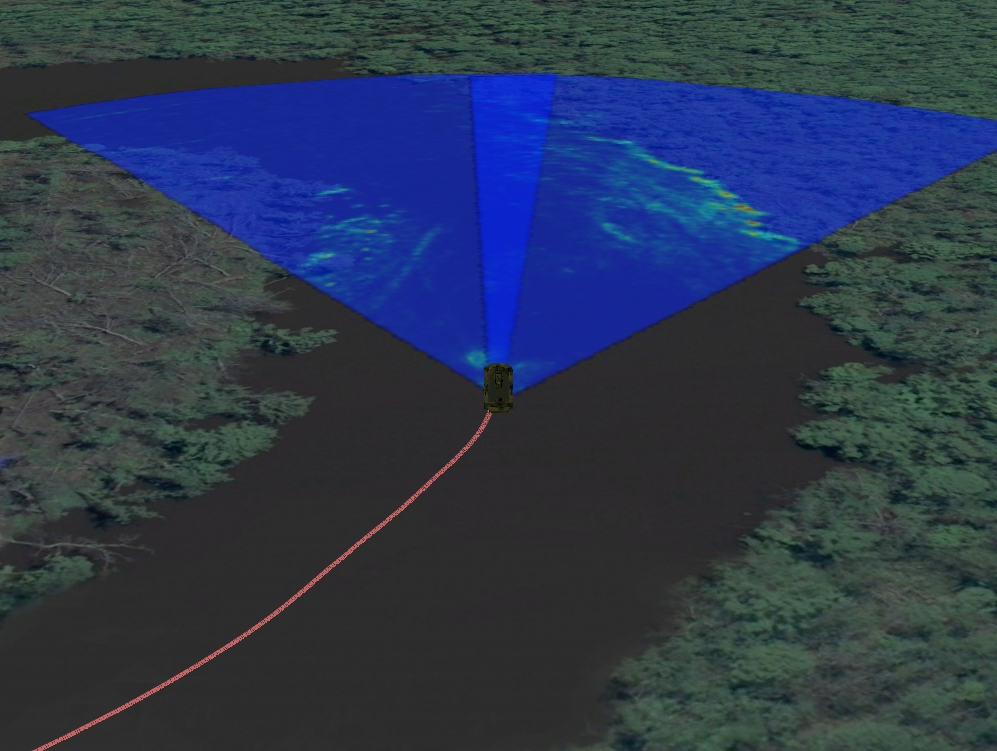
The primary goal of the NPS Center for Autonomous Vehicle Research (CAVR) at the Mechanical and Astronautical Engineering (MAE) Department is to educate students in the development and use of technologies needed for unmanned vehicles through coursework, thesis and dissertation research. The secondary goal of the CAVR is to advance Naval autonomous vehicle operations by providing support to the fleet, Navy labs and Program offices, testing and experimentation of advanced technologies, independent verification and validation of a variety of novel autonomous vehicles concepts, and by innovative concept development. Currently the CARV houses two autonomous submarines (Aries and REMUS), Sea Fox surface vehicle and a wide variety of Tier I and Tier II class unmanned aerial vehicles (UAV) staring from Scan Eagle UAV and all way down to miniature flapping-wing vehicles.
 Aerodynamic Decelerator Systems Center
Aerodynamic Decelerator Systems Center
The Aerodynamic Decelerator Systems Center (ADSC) at the MAE Department supports the development of a family of various weight precision guided airdrop systems, which enable conventional military aircraft to drop ground robots, sensors, munitions, and/or supplies at high-offsets onto the battlefield (and other hazardous and/or hostile areas) with near pinpoint accuracy, minimizing risk to the airdrop platform and limiting the need for ground vehicle convoys. The center also addresses modeling issues and design of aerial systems deployment platforms including fixed- and rotary-wing manned and unmanned aircraft and rockets. It also performs research on different sensors and real-time EO/IR image processing.
 Spacecraft Robotics Laboratory
Spacecraft Robotics Laboratory
The Spacecraft Robotics Laboratory (SRL) is a part of the MAE Department and Space Systems Academic Group. The research emphasis of the SRL is on the dynamics, navigation, guidance and control of autonomous vehicles and robotic manipulators: modeling, simulations, and hardware-in-the-loop experimentation.
 Spacecraft Research and Design Center
Spacecraft Research and Design Center
The Spacecraft Research and Design Center at the MAE Department consists of five state-of-the art laboratories: FLTSATCOM Laboratory, Smart Structure and Attitude Control Laboratory, Spacecraft Design Center, NPS-AFRL Optical Relay Mirror Spacecraft Laboratory, and Adaptive Optics Beam Control Laboratory. These laboratories are used for instruction and research in space system engineering and space operations curricula. The emphasis has been on providing students with hands-on experience in the design, analysis, and testing of space systems and systems and to provide students facilities for experimental research.
Controls and Robotics Laboratory
The Controls and Robotics laboratory at the Department of Electrical and Computer Engineering (ECE) is mainly an instructional lab that supports experiments for all courses in Guidance, Navigation, Controls, and Robotics. Lab facilities include servo control stations and associated computers (equipped with A/D and D/A data acquisition cards, LabView, and MATLAB/Simulink software) that are used to conduct simulations and physical experiments, modeling, analysis, and design of control systems, and multiple mobile robots that support laboratory experiments in robotics courses. The lab is also equipped with specialized hardware and software to support thesis research in shipboard sensor calibration, wireless and smart sensors, MEMS inertial/magnetic sensors, and nanotechnology.
Autonomous Systems and Robotics Laboratory
This is a research and teaching laboratory in the Combat Systems Department that focuses on the design testing and implementation of autonomous ground robots in support of various military applications. The teaching lab supports the capstone lab course in the physics department. The course requires students to synthesize prerequisite knowledge of analog and digital systems in a functional autonomous platform. This includes the implementation of sensors, control, and path planning to support autonomy. Students are also required to demonstrate systems knowledge of the project and an ability to interact with fellow classmates in functional design teams.
 Center for Interdisciplinary Remotely-Piloted Aircraft Studies
Center for Interdisciplinary Remotely-Piloted Aircraft Studies
The Center for Interdisciplinary Remotely-Piloted Aircraft Studies (CIRPAS) is a research center that operates manned, instrumented research aircraft in support of the science community. It also provides air vehicle support to the military on training exercises and with tests, evaluations, and operational demonstrations of military technology. Testing facilities include hangar/tarmac at the Marina municipal airport (designated OAR) and McMillan airfield (designated CA62) located near the Camp Roberts California Army National Guard Training Site southern boundary at 35º 43’N 120º 46’W, UTM. McMillan’s runway is 3,500’ long, 65’ wide with 10' shoulders and lays on a heading of 281 degrees and at an elevation of 920’. The airfield is located within restricted area designated R-2504 (surface to 15kft MSL). R-2504 is approximately 5 x 9.5 miles (8K x 16K). McMillan airfield hosts variety (up to 60) different experiments for two weeks every quarter (mid November, February, May and August).
Computer Communications and Networking Laboratory
This ECE Dept. laboratory supports instruction and research in the area of network design, engineering, and infrastructure development. Thesis work and research undertaken include modeling and simulation of high-speed and wireless networks and related protocols, video transmission over Asynchronous transfer mode (ATM) networks, traffic modeling, simulation and analysis, design and simulation of wide area networks, and related areas. Lab facilities include ATM switches, routers, LAN switches, video processing equipment, a channel simulator, a protocol analyzer, network simulation packages, and NT workstations.
 Center for Network Innovation and Experimentation
Center for Network Innovation and Experimentation
The Center for Network Innovation and Experimentation (CENETIX) at the Department of Information Sciences is a research center for exploring frontiers of self-organizing tactical networking and collaboration. It provides students and faculty with opportunities for interdisciplinary study of agile adaptive wireless networks, network-controlled unmanned vehicles, sensors, intelligent agents, and situational awareness platforms. CENETIX integrates and manages the unique student-operated NPS-SOCOM Tactical Network Topology and Maritime Interdiction Operations Testbed. The plug-and-play testbed, which includes fixed, rapidly-deployable, and mobile network operations centers, stretches between NPS, Camp Roberts, San Francisco Bay, Ft. Eustis, Port Authority NY-NJ with global reachback to the US experts centers and overseas partner sites.
Savage Laboratory
The Scenario Authoring and Visualization for Advanced Graphical Environments (SAVAGE) laboratory hosts a large, growing archive of dynamic 3D military models and authoring tools. Visualization of networked virtual worlds on large and small screens are used for improved mission planning, situational awareness and post-mission analysis. All software and model products are written in open source and built using open Web standards, especially Extensible 3D (X3D) graphics.
Testing facilities include Marina airport with an airspace below 2,500ft MSL, Camp Roberts Test Site with the McMillan strip within a restricted (up to 15,000ft MSL) airspace, and Monterey Bay.


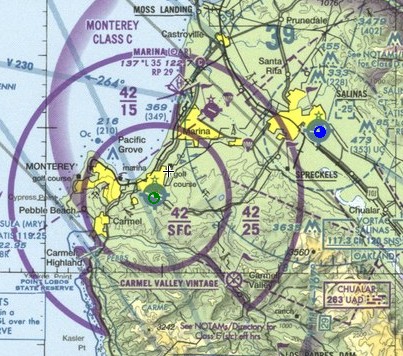
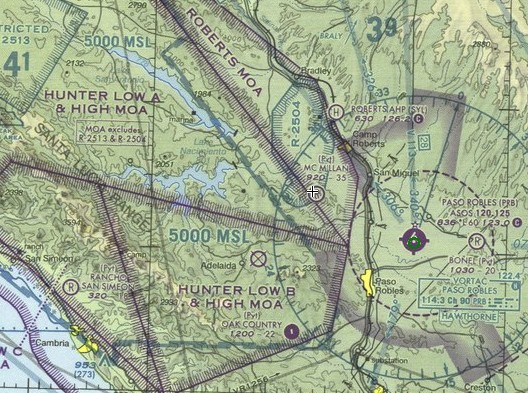
Aeronautical Charts for Marina Municipal Airport (KOAR) and Camp Roberts McMillan Airport (CA62)