
News - Field Experimentation

Innovation Accelerates Through NPS’ Ongoing Joint Interagency Field Experimentation Program
April 8, 2024

NPS Students Accelerate Innovative Over-The-Horizon Technology Solution
February 6, 2024


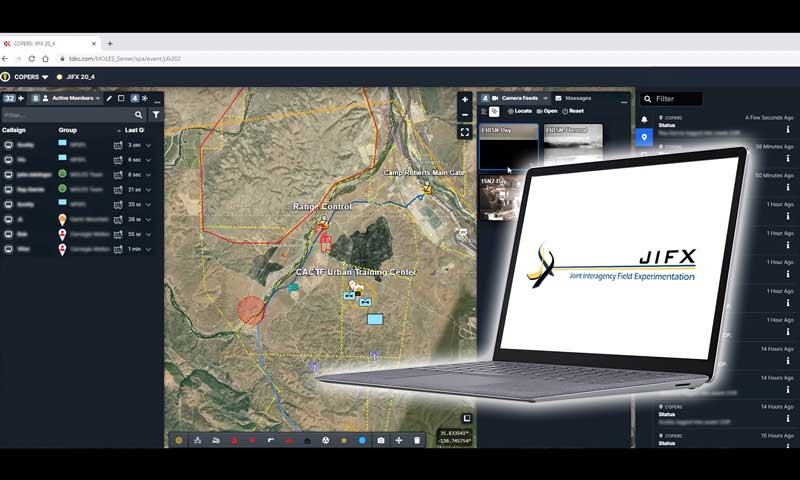
Virtual, Hybrid JIFX Continues the Collaboration on Warfighter Challenges
October 1, 2020

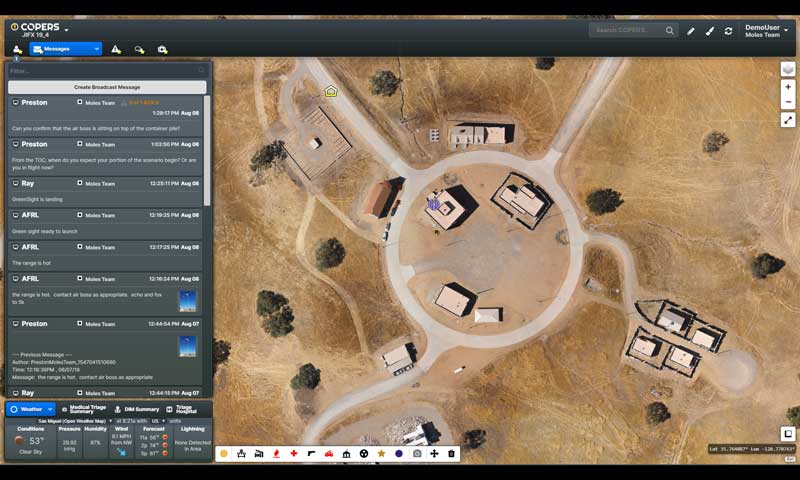
NPS, Air Force Research Lab Use JIFX to Improve Situational Awareness Tool
September 17, 2019



Naval Postgraduate School Hosts Collaborative Interagency Field Experimentation Program
February 19, 2013